
Match3D+ — Open Source Precision Wear Analysis for Dental Research and Beyond
May 20, 2026
Match3D+ — Advancing Standardization in Dental Wear Research
The Challenge: Reproducibility in Wear Analysis
Over the past decades, numerous round-robin studies in dental wear research have revealed a significant challenge: results from different research centers can vary considerably, sometimes leading to divergent assessments of the same materials.
This variability stems from several factors:
- No standardized equipment: As a relatively young field, dental wear research lacks universally adopted measurement devices, leading each institution to develop proprietary methods
- Resource constraints: Budget limitations and regional availability prevent many universities from acquiring identical hardware and software platforms
- Closed-source solutions: Commercial software often obscures the underlying algorithms, making it difficult to compare methodologies across institutions
These challenges affect not only academic research but also have implications for industrial partners — particularly manufacturers of dental composites and restorative materials who rely on consistent, reproducible wear data to validate their products.
A Personal Journey Toward Open Solutions
My research career has been fortunate to include collaborations with exceptional colleagues, enabling us to develop sophisticated measurement methodologies over more than two decades.
In the early 2000s, we created specialized software for dental wear quantification. However, being closed-source, it remained inaccessible to the broader scientific community.
This experience motivated me to explore open alternatives. I developed several plugins for ImageJ/Fiji that gained international adoption:
- Local Distance Transformation — now part of Fiji’s core distribution
- Scanco MicroCT Import — integrated into BoneJ, a widely-used bone analysis toolkit
While ImageJ remains an excellent platform, its increasingly complex build system — particularly in the Fiji distribution with its sophisticated dependency management — presents barriers for researchers without formal software engineering backgrounds.
This realization led to Match3D+.
Introducing Match3D+
Match3D+ is a modern, standalone application specifically designed for quantitative 3D surface wear analysis. It provides an accessible, end-user-optimized solution that operates independently of any plugin ecosystem.
Technical Foundation
Match3D+ represents a complete reimplementation based on the conceptual framework of Match3D 2.5, originally developed by Wolfram Gloger at LMU Munich for dental wear research on SGI IRIX workstations.
Match3D+ is part of a broader initiative to liberate scientific instrumentation from forced obsolescence. In a related project, we retrofitted a 30-year-old high-precision 3D dental laser scanner, replacing proprietary Windows-dependent software with a modern Linux-based control system. The scanner produces the VIFF and PLY files that Match3D+ analyzes. For details on reclaiming hardware independence for your laboratory equipment, see our article on Retrofitting Scientific Devices.
The new implementation emphasizes:
- Modern architecture: Built with C++20 and Qt 6.4+ for long-term maintainability
- Cross-platform potential: Developed and tested on Debian 13 (Linux), with Windows compatibility in the architecture
- Transparent algorithms: All processing methods are documented and open for inspection
- Industry-standard libraries: Incorporates CCCoreLib (from CloudCompare), nanoflann, and happly
Core Capabilities
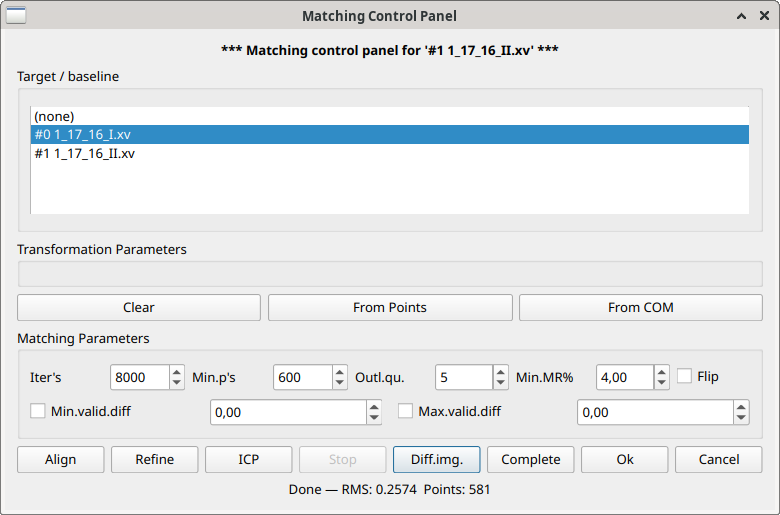
1. Surface Registration (Alignment)
Precise alignment of before/after scans is fundamental to wear measurement. Match3D+ offers a sophisticated multi-stage registration pipeline:
| Stage | Method | Description |
|---|---|---|
| Coarse | Center of Mass | Quick initial alignment via centroid matching |
| Coarse | Landmark-Based | Manual correspondence points for rotated samples |
| Fine | 4-DOF Align | Iterative refinement (rotation + translation) |
| Fine | 6-DOF Refine | Point-to-plane ICP for maximum precision |
 Multi-stage registration workflow achieving sub-micrometer alignment precision
Multi-stage registration workflow achieving sub-micrometer alignment precision
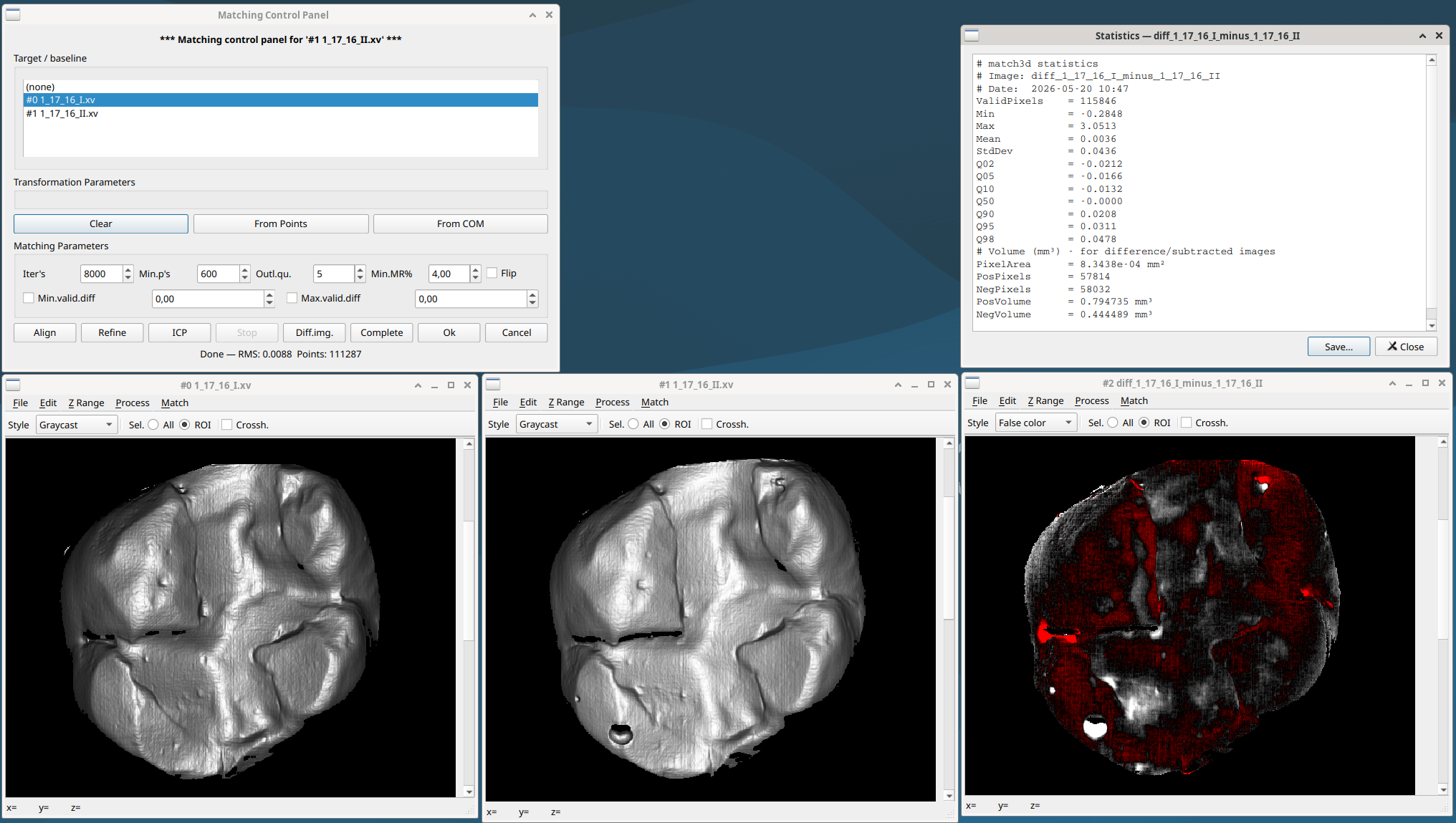
2. Difference Image Computation
After alignment, Match3D+ computes height differences between surfaces, visualized using an intuitive color scale:
- Red tones: Material loss (wear)
- White tones: Material gain (deposits)
- Black: No change
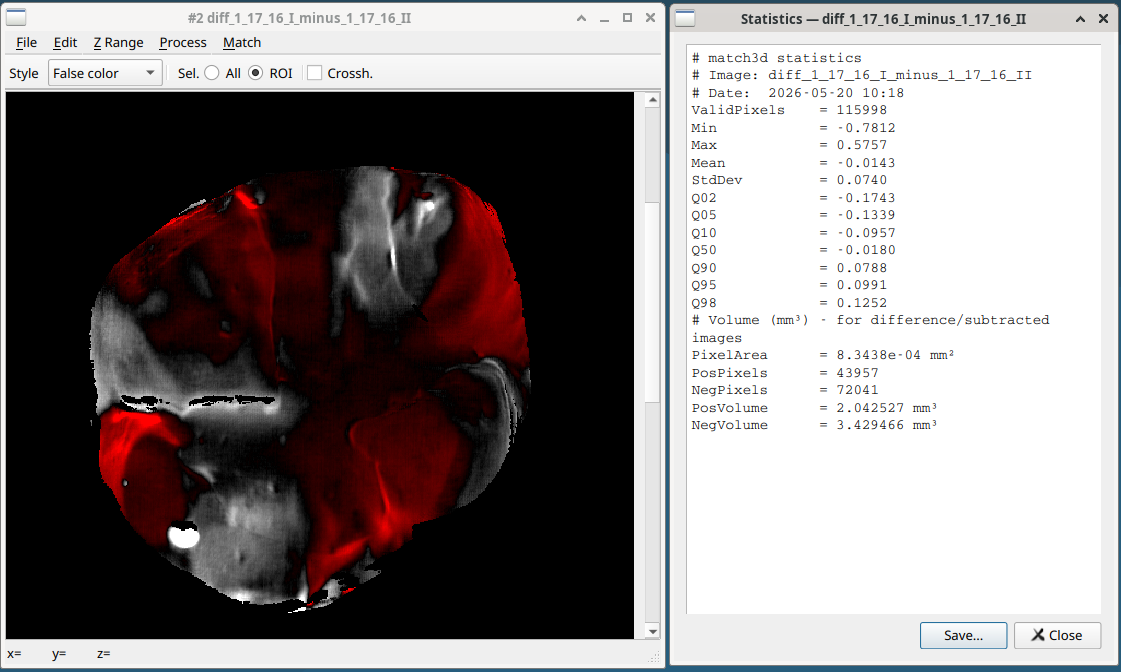 Difference image revealing wear patterns on a dental composite specimen
Difference image revealing wear patterns on a dental composite specimen
3. Surface Fitting for Standardized Specimens
For specimens with known reference geometry, Match3D+ provides geometric fitting capabilities:
Plane Fitting — For flat wear specimens:
- Fit a plane to the unworn reference surface
- Subtract to isolate wear depressions
- Directly measure wear depth and volume
Sphere Fitting — For antagonist balls:
- Fit a sphere to the unworn ball surface
- Subtract to quantify wear facet volume
- Automatic convex/concave orientation detection
4. Comprehensive Statistics
Match3D+ provides detailed quantitative analysis:
- Standard metrics: Mean, standard deviation, min/max
- Percentile analysis: Q2, Q5, Q10, Q50, Q90, Q95, Q98
- Volume calculations: Positive and negative volume for wear/gain quantification
- ROI-based analysis for focused measurements
5. Flexible ROI Selection
Multiple selection tools enable precise region definition:
- Polygon, rectangle, and ellipse selections
- Selection inversion
- Gradient clipping to exclude steep surfaces with scanning artifacts
Visualization Options
- Linear grayscale: Direct height mapping
- False color: Enhanced depth perception
- Graycast shading: 3D-like surface rendering
- Interactive histogram: Real-time Z-range adjustment
Why the “Plus”? Dual Registration Algorithms
The name Match3D+ reflects more than just a version increment. While Match3D provides the proven workflow logic for dental wear analysis, the “+” signifies a fundamental enhancement: users can choose between two mathematically distinct registration algorithms, each with specific strengths.
The Science Behind Surface Registration
When aligning two 3D surface scans, the Iterative Closest Point (ICP) algorithm family is the established standard. However, the choice of error metric fundamentally changes how the algorithm behaves.
Point-to-Point ICP (Besl & McKay, 1992)
The classic approach minimizes the Euclidean distance between corresponding points directly:
Strengths:
- Computationally efficient per iteration — no surface normal computation required
- Robust to noisy or unstructured data where stable normal estimation is difficult
- Tolerant of larger initial spatial displacements
Limitations:
- Requires more iterations to converge
- Struggles with flat or low-texture regions where points may “slide” incorrectly
- Lower peak accuracy due to discrete sampling assumptions
Point-to-Plane ICP (Chen & Medioni, 1991)
This refined approach minimizes the distance from source points to the tangent plane at target points:
Strengths:
- Dramatically faster convergence — functions similarly to Gauss-Newton optimization
- Allows natural “sliding” along surfaces, preventing entrapment in local minima
- Higher final accuracy by modeling the continuous underlying geometry
Limitations:
- Requires reliable surface normal estimation
- Sensitive to large initial angular misalignments
- Less effective on rough or highly noisy surfaces
Match3D+ Implementation
Match3D+ provides both algorithms as distinct operations:
| Button | Algorithm | Error Metric | Best For |
|---|---|---|---|
| ICP | Besl & McKay (CCCoreLib) | Point-to-Point | Noisy data, robust initial alignment |
| Refine | Neugebauer (Point-to-Plane) | Point-to-Plane | Final precision, smooth surfaces |
This dual approach allows researchers to:
- Use ICP when working with challenging data containing noise or artifacts
- Use Refine for maximum precision on well-structured dental surfaces
- Combine both — use ICP for robust initial alignment, then Refine for final precision
Why This Matters for Standardization
By exposing both algorithms and their parameters, Match3D+ enables:
- Methodological transparency: Published results can specify exactly which algorithm was used
- Reproducibility: Other researchers can apply identical processing steps
- Flexibility: Different specimen types may benefit from different approaches
- Validation: Results can be cross-checked using alternative algorithms
The “+” in Match3D+ represents this commitment to giving researchers informed choice rather than black-box processing.
References
- Besl, P. J., & McKay, N. D. (1992). A method for registration of 3-D shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(2), 239–256.
- Chen, Y., & Medioni, G. (1991). Object modeling by registration of multiple range images. Proceedings of the 1991 IEEE International Conference on Robotics and Automation, 2724–2729.
- Rusinkiewicz, S., & Levoy, M. (2001). Efficient variants of the ICP algorithm. Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling.
- Pomerleau, F., Colas, F., Siegwart, R., & Magnenat, S. (2013). Comparing ICP variants on real-world data sets. Autonomous Robots, 34(3), 133–148.
Why Open Source Matters for Wear Research
The decision to release Match3D+ under the GNU General Public License v2 reflects a commitment to scientific transparency and reproducibility.
Benefits for the Research Community
| Aspect | Open Source Advantage |
|---|---|
| Transparency | Algorithms can be inspected, validated, and cited |
| Reproducibility | Other labs can replicate your exact methodology |
| Collaboration | Improvements benefit the entire community |
| Longevity | No vendor lock-in or discontinued support concerns |
| Cost | Accessible to institutions with limited budgets |
Benefits for Industry Partners
For manufacturers of dental materials, open-source wear analysis software offers distinct advantages:
- Standardized methodology: Compare results across different testing facilities
- Regulatory documentation: Transparent algorithms support validation requirements
- Collaborative development: Contribute improvements that benefit your testing needs
- Independent verification: Claims can be verified using the same tools
Supported File Formats
Match3D+ currently supports:
| Format | Extension | Description |
|---|---|---|
| VIFF | .xv |
Visualization Image File Format — standard for 2.5D depth images |
| PLY | .ply |
Polygon File Format — for import and export |
Planned: STL Import
Many intraoral scanners export STL files, making this format increasingly relevant for clinical wear studies. STL import is planned for a future release.
However, it should be noted that the resolution requirements for wear analysis — often detecting changes of just a few micrometers — may exceed the capabilities of some intraoral scanners. This will be evaluated before optimizing STL import for wear measurement workflows.
Getting Started
System Requirements
- Operating System: Linux (Debian 13 tested), Windows (compilation supported)
- Qt: Version 6.4 or newer
- Compiler: C++20 compatible (GCC 11+, Clang 13+, MSVC 2019+)
Installation
# Clone the repository with submodules
git clone --recursive https://github.com/kkunzelm/match3d-plus.git
cd match3d-plus
# Build
mkdir build && cd build
cmake ..
make -j$(nproc)
# Run
./src/match3d_plus
Documentation
Comprehensive documentation is available in the repository:
- User Manual: Registration
- User Manual: ROI, Histogram, Statistics
- User Manual: Surface Fitting
- Technical: Registration Algorithms
- Technical: Surface Fitting Mathematics
Professional Services
While Match3D+ is freely available, organizations requiring additional support can access:
- Training sessions: Hands-on instruction for research teams
- Custom development: Feature additions or integrations tailored to specific workflows
- Consulting: Methodology validation and workflow optimization
For inquiries: www.kunzelmann.de
Contributing to Standardization
Match3D+ represents one contribution toward the larger goal of standardizing wear research methodology. By providing transparent, accessible tools, we can work collectively toward:
- Improved inter-laboratory comparability
- More reliable material assessments
- Accelerated development of wear-resistant dental materials
The source code is available on GitHub. Contributions, feedback, and collaborative development are welcome.
Repository: github.com/kkunzelm/match3d-plus
License: GNU General Public License v2
Author: Prof. Dr. Karl-Heinz Kunzelmann
Match3D+ — Open tools for reproducible science.